DETECCIÓN DE OBSTÁCULOS EN TIEMPO REAL PARA UNA MOVILIDAD INTELIGENTE Y SEGURA
La conducción autónoma ha emergido como un fenómeno transformador en la industria del transporte, prometiendo revolucionar la forma en que nos movemos. En el corazón de esta revolución se encuentra la capacidad de los vehículos autónomos para detectar obstáculos en tiempo real, una función crítica que garantiza la seguridad y eficiencia de la movilidad inteligente. Este artículo explora en detalle la importancia de la detección precisa de obstáculos, los sensores involucrados, y las tecnologías que impulsan este proceso.
UN HITO TECNOLÓGICO
La conducción autónoma, un hito tecnológico en constante evolución, ha alterado radicalmente la forma en que concebimos el transporte. Este fenómeno se refiere a la capacidad de los vehículos para operar de manera independiente, sin intervención humana directa, y representa una convergencia de tecnologías avanzadas que prometen transformar nuestra experiencia en carretera.
La conducción autónoma se define por la capacidad de un vehículo para funcionar de manera autónoma, es decir, sin la necesidad de intervención humana constante. Este avance tecnológico es impulsado por una combinación de hardware y software sofisticados que permiten al vehículo percibir su entorno, tomar decisiones en tiempo real y ejecutar acciones sin la participación del conductor.
Existen diferentes niveles de autonomía, clasificados del 0 al 5 según la Sociedad de Ingenieros Automotrices (SAE):
- En el nivel 0: el vehículo es completamente controlado por el conductor.
- Mientras que en el nivel 5, el vehículo es capaz de operar de manera autónoma en todas las condiciones sin necesidad de intervención humana.
LA IMPORTANCIA DE UNA DETECCIÓN DE OBSTÁCULOS PRECISA Y EN TIEMPO REAL
La esencia de la conducción autónoma radica en su capacidad para interpretar y reaccionar a su entorno de manera eficiente y segura. La detección precisa de obstáculos en tiempo real es una de las piedras angulares de este sistema, ya que permite a los vehículos tomar decisiones informadas para evitar colisiones y garantizar la seguridad de los ocupantes y otros usuarios de la vía.
En entornos urbanos y suburbanos, donde la complejidad de las interacciones entre vehículos y peatones es elevada, la detección precisa de personas es igualmente crucial. La capacidad de reconocer patrones de comportamiento humano y anticipar movimientos es esencial para garantizar una interacción segura entre vehículos autónomos y peatones.
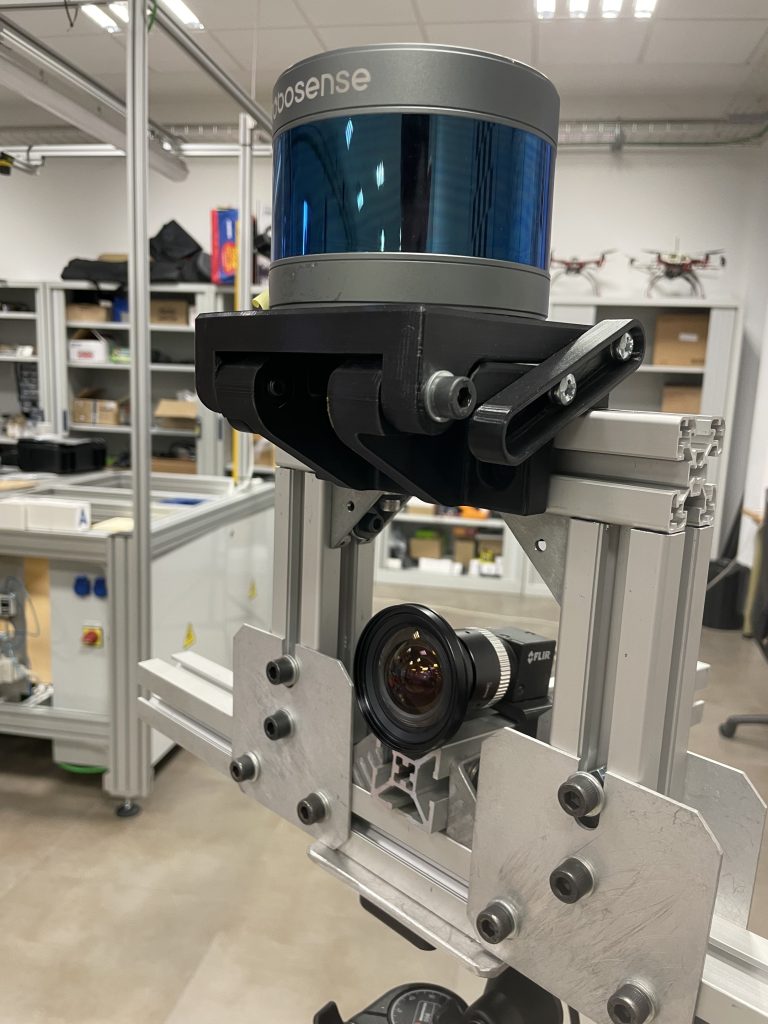
La detección se realiza mediante el uso de una cámara flir y un sensor LiDAR de 16 planos de Robosense. La imagen de la cámara se pasa por una red de reconocimiento (YOLOv8)
A lo largo de los últimos años, el desarrollo y pruebas de vehículos autónomos han estado marcados por incidentes que han suscitado debates sobre la seguridad de esta tecnología. Recientemente, algunos estados norteamericanos, como California, han paralizado el servicio de robotaxis que venía operando (Cruise, en este caso) desde hace meses debido a varios incidentes provocados por estos vehículos.
Estos incidentes, aunque raros, han puesto de manifiesto la importancia de perfeccionar las capacidades de detección de obstáculos para evitar situaciones que pongan en peligro a peatones y a otros conductores.
SENSORES UTILIZADOS EN LA DETECCIÓN DE OBSTÁCULOS
La percepción precisa del entorno es posible gracias a la implementación de una amplia gama de sensores avanzados en los vehículos autónomos. Las cámaras de alta resolución desempeñan un papel vital al capturar información visual detallada que abarca desde la identificación de objetos estáticos hasta el seguimiento de movimientos. Estos dispositivos, equipados con lentes especializadas y sistemas de enfoque, permiten al vehículo discernir matices esenciales en su entorno.
Además, los lidar, basados en la emisión de pulsos láser, contribuyen a la construcción de un mapa tridimensional altamente preciso del entorno circundante. Esta tecnología láser, al calcular el tiempo que tarda la luz en rebotar en objetos cercanos, proporciona mediciones de distancia con una precisión extraordinaria. Los radares, que emplean ondas de radio, complementan esta percepción al detectar objetos más allá del alcance visual y evaluar su velocidad.
La fusión de estos sensores permite al vehículo construir un modelo integral de su entorno, superando las limitaciones individuales de cada tecnología y proporcionando una percepción más robusta y completa. Este enfoque multisensorial no solo mejora la detección de obstáculos, sino que también sienta las bases para la adaptación inteligente en situaciones dinámicas y desafiantes..
TECNOLOGÍAS EMPLEADAS EN EL PROCESO
A continuación se describen algunas de las tecnologías más importantes a la hora de analizar y procesar la información recogidas por los diferentes sensores del vehículo.
Inteligencia Artificial y Machine Learning
La aplicación de inteligencia artificial ha impulsado avances notables en el reconocimiento y segmentación de entornos. Con el desarrollo significativo de los últimos años, los algoritmos de aprendizaje automático permiten a los vehículos autónomos identificar obstáculos, adaptarse y aprender de patrones cambiantes.
Estos sistemas utilizan datos de sensores para mejorar continuamente su capacidad de toma de decisiones, resultando en una conducción más segura y eficiente. La posibilidad de reentrenar los sistemas permite adaptar algoritmos a diferentes entornos, siendo crucial delimitar su uso y llevar a cabo un reentrenamiento antes de la implementación para garantizar una percepción precisa y un desempeño óptimo en distintos contextos.
Los sistemas de conducción autónoma se basan en cuatro funciones centrales de machine learning para analizar constantemente su entorno, tomar decisiones informadas y anticipar cambios potenciales en la ruta. La automatización de la conducción se logra mediante la integración de tecnologías de vehículos autónomos y diversos sensores.
- Detección: emplea la información recopilada por sensores de cámara, LiDAR y RADAR para obtener información del entorno.
- Segmentación: agrupa información recibida para segmentar esta información en diferentes categorías como peatones, carriles de carretera y tráfico.
- Clasificación: utiliza categorías segmentadas para clasificar objetos relevantes, descartando los irrelevantes para la conciencia espacial, como identificar el espacio disponible en la carretera en tiempo real para conducir sin accidentes.
- Monitoreo: continúa observando objetos clasificados relevantes en las proximidades del vehículo para prever la siguiente acción durante todo el viaje.
Sistemas de Fusión Sensorial
Si un vehículo autónomo aspira a tomar decisiones equiparables al cerebro humano, o en algunos casos, incluso superiores, necesita datos provenientes de diversas fuentes para mejorar la precisión y lograr una comprensión más completa del entorno que lo rodea.
Es así como la fusión sensorial emerge como una componente esencial en la navegación autónoma, actuando como el catalizador que permite a estos vehículos interpretar y reaccionar de manera eficaz ante un entorno en constante cambio.
La fusión sensorial es el proceso de tomar de forma grupal las entradas de RADAR, LiDAR y cámara para interpretar las condiciones ambientales para la certeza de la detección. No es posible que cada sensor funcione de forma independiente y entregue toda la información necesaria para que un vehículo autónomo funcione con el más alto grado de seguridad.
Si desde una cámara se está percibiendo un obstáculo, a esta información le falta la información tridimensional que el lidar o el radar puede proporcionar. Si es el lidar el que ve un obstáculo en la carretera, a este le falta información sobre el tipo de obstáculo que será aportada por la información de la cámara.
Visión Artificial
La visión artificial desempeña un papel esencial en la interpretación de datos visuales para los vehículos autónomos. Algoritmos avanzados permiten el reconocimiento de objetos, personas y señales de tráfico, mejorando la toma de decisiones informadas.
Aunque existen redes especializadas en la información proporcionada por los lidars para el reconocimiento de objetos, la clave para fortalecer la seguridad radica en la capacidad de cotejar este reconocimiento con la información aportada por la visión artificial, y viceversa. La integración de ambos tipos de sensores amplía la seguridad global del sistema al proporcionar una percepción más completa y precisa del entorno circundante.
DESAFÍOS Y FUTURO
A pesar de los notables avances, la conducción autónoma enfrenta diversos desafíos. La adaptación a condiciones climáticas adversas, la mejora de la interpretación de señales humanas y la interacción segura con vehículos no autónomos son áreas que requieren atención continua.
Además, la ética y la responsabilidad en caso de accidentes plantean cuestionamientos fundamentales sobre la implementación generalizada de estos sistemas.
El futuro de la tecnología en el reconocimiento y detección de obstáculos en sistemas de conducción autónoma se presenta emocionante. La investigación y desarrollo continuos, junto con la colaboración entre la industria y los reguladores, son cruciales para garantizar la seguridad y eficiencia de estos sistemas.
A medida que la tecnología evoluciona, se espera que la conducción autónoma se convierta en una parte integral de nuestra vida cotidiana, transformando la forma en que nos movemos y redefiniendo la industria del transporte.
MÁS INFORMACIÓN
Si quieres profundizar más en torno a los retos del ámbito de la Movilidad Sostenible y las soluciones tecnológicas que desde ITAINNOVA hemos desarrollado, puedes hacerlo consultando la siguiente página:

Autores: Daniel Cantón y Pilar Vidal (Mecatrónica y Robótica).

Daniel Cantón y Pilar Vidal
ARTÍCULOS DEL MÍSMO ÁMBITO
-
Resumen de la jornada sobre Movilidad Sostenible (II TechWeek de ITAINNOVA)
Viernes, 02 Diciembre 2022
- Cadenas logística inteligentes
- Diseño y desarrollo de vehículos eficientes
- Movilidad urbana
-

OTROS ARTÍCULOS
-

La 3ª edición del T-Program comienza el 28 de febrero
Sábado, 20 Enero 2024
- Big Data y Sistemas Cognitivos
- Industria 4.0
- Internet of Things (IoT)
- Mecatrónica
- Robótica
- Sistemas Eléctricos
- Smart Labs
-